Modellelektronik
Leser, die bereits in den Abschnitt "Über mich und meine Bücher" geschaut haben, werden merken, dass die Auswahl für die hier vorzustellende Modellelektronik sicher schwer fällt. Ich werde mich daher nur auf einige wenige Beispiele beschränken. Wer mehr erfahren will, kann ja in den aufgelisteten Büchern nachlesen.
Die digitale Proportionalfernsteuerung für den Selbstbau
Die hier vorgestellte Fernsteueranlage wurde von mir für das Urania-Buch: "Ferngesteuerte Modelle - selbst gebaut" entwickelt und ist in dem Buch ausführlich in ihrer Funktion und dem Aufbau beschrieben. Für mich interessant ist die Tatsache, dass mir die Anlage selbst heute (2010), nach so vielen Jahren seit dem Erscheinen des Buches (1977) auf Modellveranstaltungen begegnet. Es muss doch wohl eine gut funktionierende Anlage sein, wenn selbst "elektronische " Laien sie aufbauen konnten und nach so langer Zeit noch stolz vorführen. Die Proportionalanlage war für ihre Zeit durchaus auf dem technischen Stand der industriell hergestellten Modellfernsteuerungen. Sender und Empfänger waren mit Quarz stabilisiert und arbeiteten im 20kHz-Raster des 27MHz-Bandes. Es konnten folglich mehrere Anlagen parallel betrieben werden, so dass die Anlage auch für Regatten z.B. FSR-Rennen einsetzbar war. Mit dem 27MHz-Band hatte man einen Frequenzbereich, der auch in der DDR für den Eigenbau von Fernsteueranlagen frei gegeben war.
Der Sender
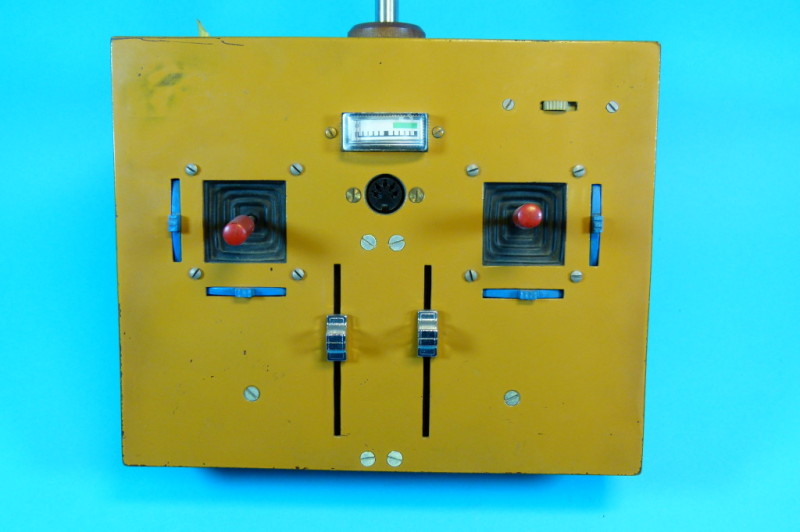
Den Sender aufzubauen, musste man sich schon einige feinmechanische Arbeit zutrauen. Außerdem sollte der Sender so robust sein, dass er auch längeren Gebrauch überstand. Das Gehäuse ist aus kupferbeschichtetem Leiterplattenmaterial (1,5mm) hergestellt. Das Material lässt sich gut mit Säge, Bohrer und Feile bearbeiten, es ist vollkommen eben und kann gut zu einem Gehäuse zusammengefügt werden (weich löten). Das Gehäuse hat die Maße
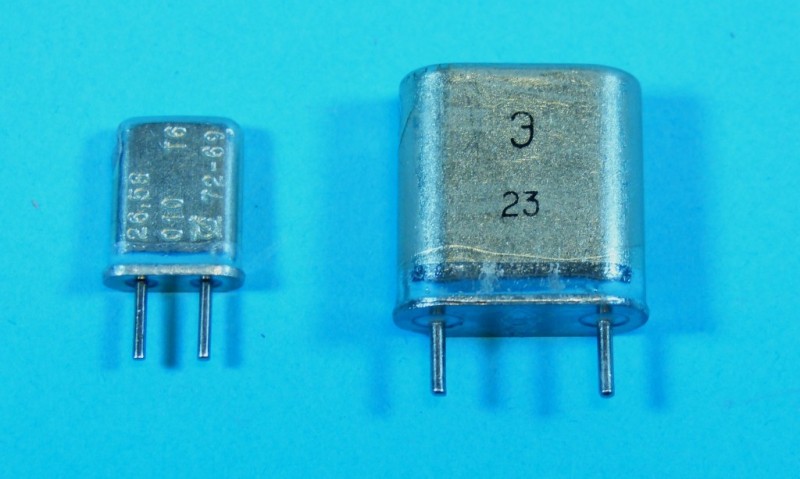
(195 x 155 x 53) mm, der Sender wiegt voll ausgebaut 1260g. Etliche feinmechanische Arbeit steckt in den Steuerknüppeln, die ja trimmbar sein sollen. Viele Teile stammen aus dem Ersatzteilhandel für damals gehandelte Kofferradios, so die Teleskopantenne, das kleine Zeigermessgerät für die Batterieanzeige und natürlich die elektronischen Bauteile. Die gasdichten NiCd-Akkus waren damals noch Knopfzellen, hergestellt vom Grubenlampenwerk Zwickau. Die Quarze (27 MHz) musste man sich beim Hersteller bestellen, anfangs Carl Zeiss Jena später dann VEB Narva Berlin. Ein Fortschritt war die kleine Bauform der Quarze, vor allem für die Empfänger. Die Leiterplatte der Senderelektronik ist über Abstandsbolzen unter der Stirnseite des Senders befestigt. So kann der Wechsel des Steckquarzes über eine kleine Öffnung in der Stirnseite einfach erfolgen. Und wenn der Sender dann endlich fertig war und seine erste Probe bestanden hatte, musste er bei der Deutschen Post zur Genehmigung vorgestellt werden. Die Genehmigungsurkunde war immer mitzuführen, am besten man klebte sie gleich in das Sendergehäuse.
Die Empfänger
Die Empfänger nutzten die aus dem Rundfunkbereich bekannten Superhetschaltungen, allerdings mit quarzstabilisiertem Oszillator und damals schon verfügbaren Piezofiltern in den ZF-Stufen. Die Piezofilter stammten aus den Keramischen Werken Hermsdorf/DDR, denn die japanischen Piezofilter waren uns nicht zugänglich. Der Zweikanalempfänger war mit Transistoren bestückt, während der Sechskanalempfänger bereits einen Empfängerschaltkreis enthielt. Die Signaldekodierung übernahmen IC der 74-er Reihe. Aufgebaut war der Zweikanalempfänger mit Dekoder auf einer Platine, während der Sechskanalempfänger getrennte Platinen für Super und Dekoder enthielt. Für beide Empfänger baute ich die Gehäuse aus 1,5mm Polystyrol, das sich mechanisch gut bearbeiten und gut kleben lässt. Der Zweikanalempfänger mit den Maßen 80x43x22 wog 58g und der Sechskanalempfänger mit den Maßen 69x43x32 wog 62g. Das konnte sich im Vergleich mit Industrieprodukten durchaus sehen lassen, bei ebenfalls vergleichbarer Reichweite der Anlage.
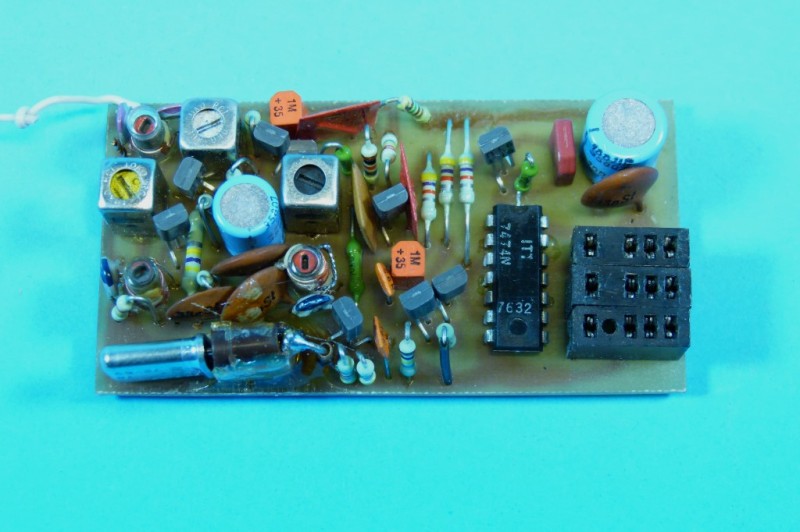
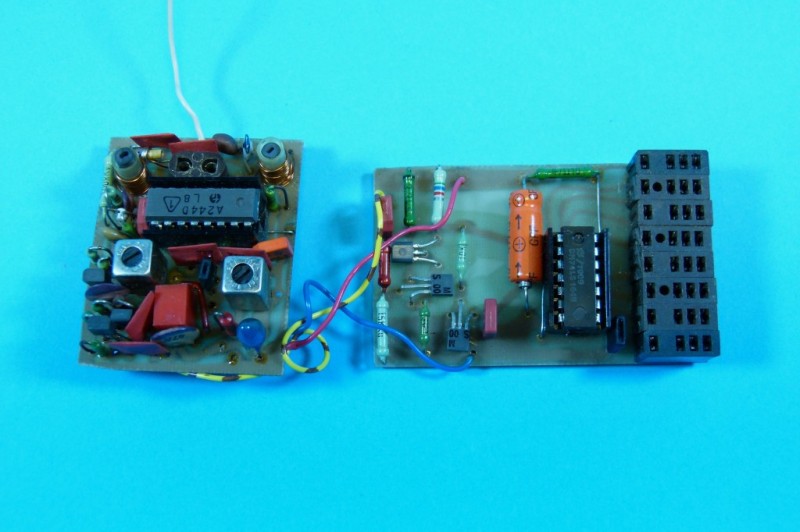
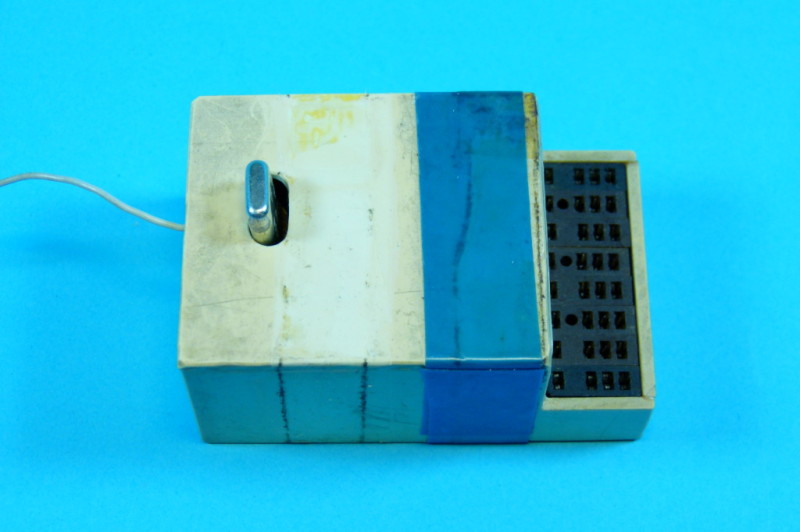
In der Bildergalerie von links nach rechts:
Platinenaufbau Zweikanalempfänger, Platinenaufbau Sechskanalempfänger, Sechskanalempfänger im Gehäuse
Segelwinde und Fahrtregler
Um die an den Kanalausgängen des Empfängers anliegenden elektrischen Signale in mechanische Stellwege z.B. den Ruderausschlag oder die Segelverstellung umzusetzen, sind weitere Funktionsgruppen wie Servo oder Segelwinde erforderlich. In dem Urania-Buch wird der Selbstbau einer Servomechanik mit Servoelektronik sowie einer Segelwinde mit Steuerelektronik beschrieben.
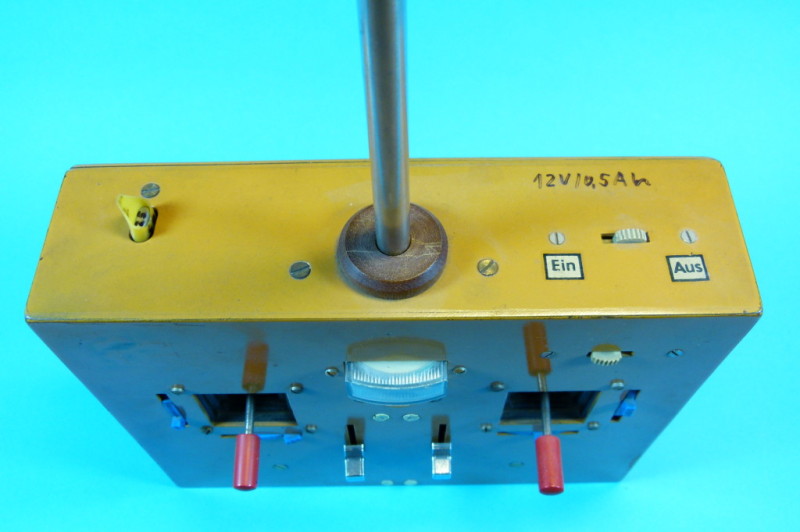
Stellvertretend ist die Segelwinde abgebildet. Für ihre Konstruktion wurde ein zweistufiges Schneckengetriebe kombiniert mit einem Stirnradgetriebe gewählt. Durch das Schneckengetriebe erzielt man die gewünschten hohen Stellkräfte und die starke Untersetzung für einen großen Stellweg. Der Stellweg konnte außerdem durch die Wahl des Durchmessers der Wickeltrommel angepasst werden. Diese Getriebekonstruktion brachte dann in der Praxis auch eine hohe Stellgenauigkeit.
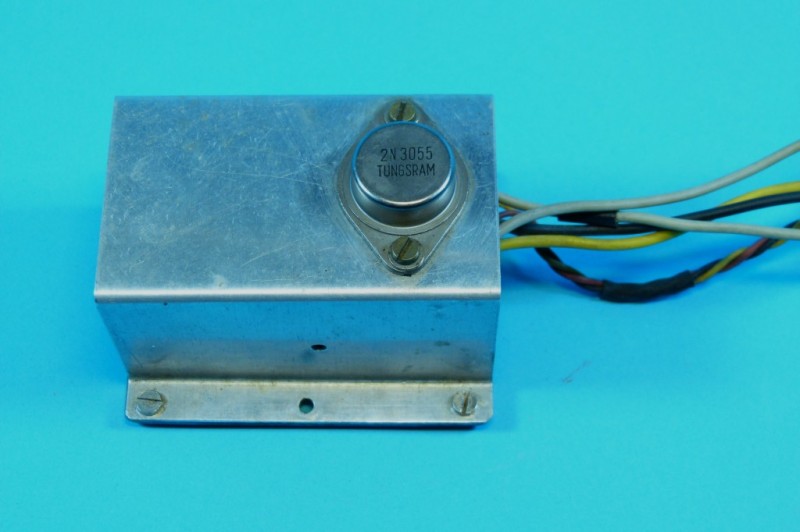
Für die Steuerung des Motorstromes in elektrisch angetriebenen Modellen ist ein Drehzahlsteller, wie er korrekt bezeichent wird, erforderlich. Eingebürgert hat sich allerdings die Bezeichnung Fahrtregler. Der Fahrtregler steuert den Motorstrom von Null bis zum Maximum und das in beide Drehrichtungen. Für den Wechsel der Drehrichtung enthält der abgebildete Fahrtregler ein Umpolrelais und zur Steuerung des Motorstromes den Leistungstransistor, der zur Kühlung direkt auf des Metallgehäuse geschraubt ist.


Obere Bildreihe: Segelwindenmechanik
Untere Bildreihe: Fahrtregler, links geöffnet (Relais sichtbar), rechts fertig montiert